
В минувшее воскресенье, 5 декабря, NASA провело 17-й полёт марсианского вертолёта Ingenuity. Переход длиной около 187 м в северо-восточном направлении прошёл преимущественно в штатном режиме, однако на заключительном этапе, когда аппарат уже производил спуск, связь между Ingenuity и марсоходом Perseverance нарушилась.
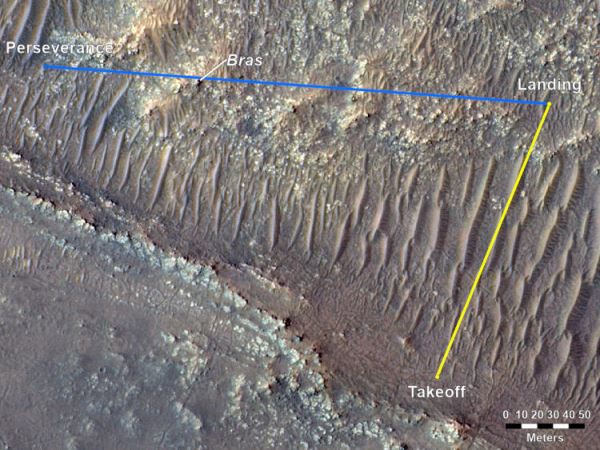
Переход Ingenuity в 17 полёте. Слева обозначена позиция ровера Perseverance и холма Бра между ними. Источник изображений: mars.nasa.gov
Тем не менее, вертолёту удалось успешно сесть. Примерно через 15 мин. после потери связи ровер всё-таки продолжил получать пакеты с телеметрией от Ingenuity — данные указывали на исправность батареи и бортовой электроники. По версии NASA, отключение было вызвано «сложной конфигурацией радиосвязи» между Ingenuity и Perseverance. При последующем анализе телеметрии было установлено, что в ходе продолжавшегося 117 с полёта на высоте 10 м над поверхностью планеты аппарат работал в штатном режиме — однако в наборе данных отсутствовала телеметрия по последней трети спуска на высоте 3 м и ниже.
В минувшую среду специалистам NASA всё-таки удалось передать недостающие пакеты с телеметрии 17-го полёта сначала на Perseverance, а затем и на Землю. Анализ данных показал высокий уровень мощности на бортовых системах вертолёта, в цепи от солнечных батарей до аккумуляторов его уровень также был отмечен как высокий, и это позволило NASA утверждать, что аппарат пребывал в вертикальном положении. Вместе с тем, команда Ingenuity по-прежнему отмечает проблемы со связью вне зоны прямой видимости — из-за неё при передаче данных на ровер теряются некоторые пакеты.

Топографический профиль местности между Perseverance и Ingenuity — расстояние между аппаратами составляет 321 м
NASA заранее знало, что Ingenuity столкнётся с проблемами в сложных условиях, поскольку он был спроектирован для работы на равнине. Сейчас он находится в районе с большими перепадами высот, что создаёт сложности как для навигационного ПО, так и для связи с Perseverance — ей препятствуют не только объекты, преграждающие прямую видимость, но и в отдельных случаях настройки приёмника на ровере.
Сейчас между ними находится холм под названием Бра. Его высота составляет всего около 4 м, но этого оказалось достаточно, чтобы затруднить связь. Первоначально 17-й полет Ingenuity планировался при другом положении Perseverance, однако было принято решение переместить марсоход для решения других задач, что в итоге вызвало затруднения.
Вертолёт был построен с учётом того, что подобные проблемы могут возникнуть: при завершении полёта его питание автоматически отключается, и аппарат ожидает дальнейших инструкций. 17-й полет Ingenuity был признан успешным, что подтверждается данными, которые Perseverance получил после предполагаемой посадки. Сейчас марсианский вертолёт работает в намного более суровых условиях, чем предполагались при его проектировании.
В частности, это касается смены сезонов на планете, в результате которой и без того низкое атмосферное давление упало ещё сильнее — для того, чтобы Ingenuity не утратил возможность летать, скорость вращения роторов пришлось увеличить до 2800 об/мин.
Источник: 3dnews.ru


